
Neues Add-On für Visual Components: Probieren Sie unsere kostenlose Demoversion aus!
Die Sicherheitsanforderungen an kollaborative Robotersysteme stellen Systemintegratoren und Anlagenplaner vor große Herausforderungen. Aus Sicht des Fraunhofer IFF liegt das an den heute üblichen Planungs- und Entwurfsmethoden, die insbesondere auf die Sicherheitsvorgaben für Mensch-Roboter-Kollaboration nicht angepasst sind. Heute ist es bspw. nicht möglich, die Mindestsicherheitsabstände für die Sicherheitsbetriebsart „Geschwindigkeits- und Abstandsüberwachung“ (nach ISO/TS 15066) präzise in der Planungsphase zu berücksichtigen, da die hierfür erforderlichen Funktionen bislang fehlen.
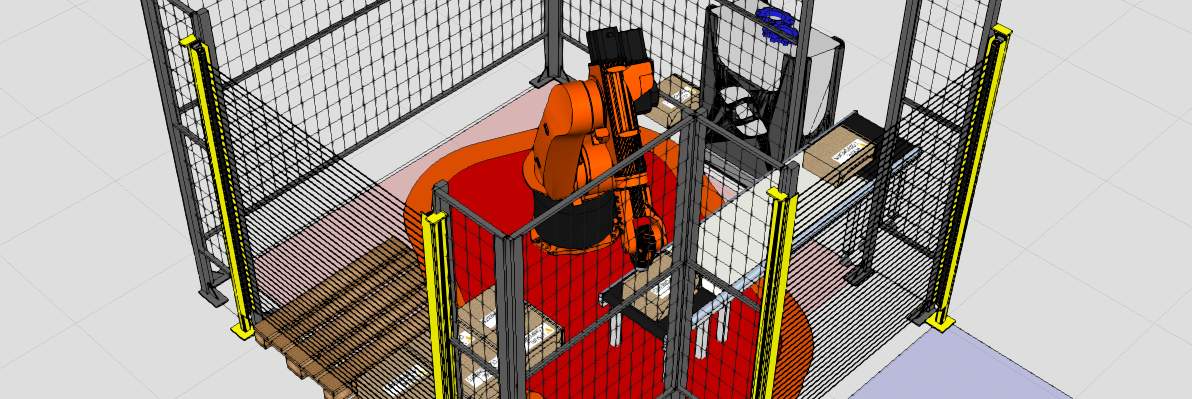
Mit einem brandneuen Add-On für Visual Components schließt das Fraunhofer IFF diese Lücke. Mit dem Add-On lassen sich ab sofort die Sicherheitsabstände zuverlässig und kinderleicht berechnen. Das Add-On unterstützt Sie dabei, die Abstandsformel aus ISO/TS 15066 für Ihr individuelles Robotersystem zu lösen. Damit gelingt Ihnen eine platzsparende Auslegung der Sicherheitsbereiche und eine optimale Anordnung der Sicherheitssensoren. Eine voll funktionsfähige Demoversion des Add-Ons können Sie sich hier kostenlose herunterladen.
Die Demoversion berücksichtigt die zeitaktuelle Ausladung, Beladung und Geschwindigkeit nicht. Das leistet erst die Vollversion und resultiert in signifikant kleinere Sicherheitsbereiche. Bei Fragen und Anregungen zur Demoversion und/oder Vollversion schreiben Sie uns! Wir setzen uns gerne mit Ihnen in Verbindung.


{kind=link}
{kind=link}