
A controller or control system is an essential wind turbine component. In modern wind energy turbines, stable operation is not possible without a controller.
As a research associate at Fraunhofer IWES, I work in the field of control technology for wind turbines. This includes the development of wind turbine controllers, i.e., the compilation of requirements, the implementation, and, finally, the validation. In my first week at work, I started by researching literature on the topic. In the meanwhile, we at the IWES are now developing our own toolbox and a modular controller specially for wind turbines. The modularity facilitates the introduction of changes and makes the wind turbine controller flexible as far as the control strategies are concerned, as components can be exchanged easily. The wind turbine controller can thus be quickly adapted to new requirements and employed for our research.
Controllers are one of the important components of a wind turbine, but their specific characteristics are generally not spoken about that much. Personally, I find controllers fascinating, as they are where everything comes together: as the central unit, the controller processes all the information concerning the wind turbine’s current operating state and environment. On the basis of the turbine behavior, it calculates how the wind turbine should react to changed conditions in order to achieve an optimal energy yield and ensure nothing is damaged. The controller then normally intervenes by adjusting the pitch angle and the torque on the generator. High expectations are placed on a controller: it must work perfectly at all times – under all circumstances – and never fail. To be more precise, situational failures are to be avoided, because they can lead to instability of operation and cause damage to the turbine. This results in interesting control engineering questions such as “What does optimal operation look like?”, “What dynamics can I achieve?”, and “How high is the robustness?”. Finding the right answers can sometimes prove to be somewhat of a headache, because if the controller stops working correctly, we have to try to find a solution as quickly as possible.
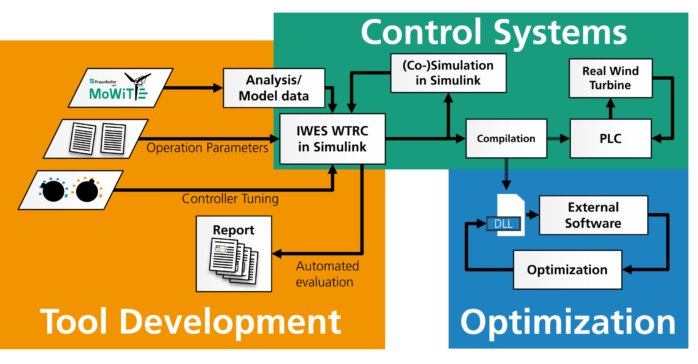
My colleagues at the Dynamic Nacelle Testing Laboratory (DyNaLab) work together with me on specific solutions with simulation models of wind turbines in various power classes from 2.5 megawatts (MW) up to 15 MW. Each of these turbines requires a controller to guarantee its stable operation. The configuration for each turbine is determined via an automated analysis of the respective wind turbine model, the operating parameters, and the controller settings. The diagram shows the development and application process for the IWES wind turbine controller. This process covers our research activities in the field of simulation at the DyNaLab, which extend from standardized turbine simulations up to the optimization of an entire wind farm.
When developing a controller, it is important that we never lose sight of the big picture. For the controller, that means that changes can be made easily and there is always a certain degree of flexibility available. It was therefore important to consider a modular structure right from the beginning. The reusability of individual modules increases the flexibility and shortens our development process. This principle has allowed us to reuse our parameterizable pitch controller model a number of times and select other modules for the signal filters depending on the respective turbine. Every turbine has slightly different dynamics and thus places different demands on the signal processing. As such, we could satisfy the specific requirements of each individual type of turbine, employ the controller in a versatile manner, and reuse component models. Our method thus functions like object-oriented programming, apart from the fact that we use Simulink models instead of only program codes.
We have already specifically employed our method in an industrial project for the evaluation of a new sensor system for load measurement. The plan was also to use this sensor technology in our controller, but the problem was that this sensor represented a new concept and could not be easily integrated into the controller without further measures. We first developed a sensor model for the simulation in collaboration with the customer and then implemented the interface for a module inside the wind turbine controller. That was possible quickly thanks to the modularity, and we were able to integrate this additional evaluation into the project. The evaluation was then based on our simulations, enabling us to complete the entire project within just a few weeks.
In another project, we employed our controller in a more innovative way: specifically, the question was whether an intelligent wind farm controller in a wind farm with 6 MW wind turbines would produce cost advantages for operators. The challenge in that case was that we had no corresponding model of the 6 MW turbine available, but we did have a model of a 7.5 MW wind turbine (IWT 7.5-164). Our solution was to operate the 7.5 MW turbine just like the 6 MW one by adapting the controller in such a way that the IWT 7.5-164 reproduced the 6 MW wind turbine’s performance curve and thrust coefficients depending on the wind speed. No sooner said than done! This required some adjustments to the profile curves for the generator torque and the pitch angle of the controller, but we were ultimately able to reproduce the behavior of the 6 MW turbine and thus had a “new” turbine model.
For me, this innovative approach is what is so special about applied research, as even unconventional approaches can be used when solving problems. It therefore allows me to deepen my knowledge comprehensively.
We will continue to develop our IWES toolbox further and will soon be working with model predictive control, where a prediction of the wind speed, for example, is used to calculate the optimal response of the wind turbine. That is something I am looking forward to already.
More information here:
Nacelle Testing and Examination of Electrical Characteristics (fraunhofer.de)